|
|
|
|
|
|
OPTIMUM
PID CALCULATION
based on Zieglar-Nichols's
tuning rule
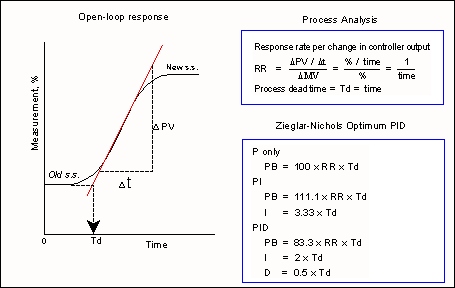
1a. The Fundamental: Self regulating process (SR) e.g. flow, pressure, temperature, pH.
1b. The Fundamental: Nonself regulating process (NSR) e.g. level
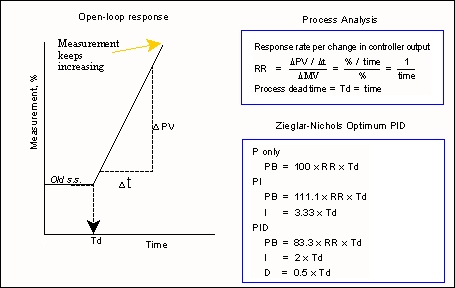
2. Process Analysis
a. Mark the steepest point
on the response curve.
b. Draw a tangent line at
the steepest point.Red line as shown for SR. However, NSR does not require
a tangent line.
c. Calculate the process
rate at the tangent line i.e.change in PV / change in t
d. Calculate RR i.e the
process rate per change in controller output.
e. The deadtime is estimated
by intersecting the tangent line and the base line of the old steady state
response
3. Optimum PID
a. Decide a control mode
i.e. P only, PI or PID
b. Decide a tuning rule
e.g. Zieglar-Nichlos
c. Calculate the PID values
EXAMPLES: Calculation on the optimum PID for Self regulating and Non-self regulating processes.